")



Опис
Плата управління двигунами L293D для NodeMCU – це одночасно мотор шилд та плата розширення для WI-Fi модулів NodeMCU V2. Як драйвер для двигунів використовується мікросхема L293D, що дозволяє керувати двома двигунами постійного струму або одним кроковим. Максимальний довготривалий вихідний струм для кожного каналу – 0.6А, короткочасний – 1.2 А.
Характеристики:
- Мікросхема L293D
- Напруга живлення логічної частини 4.5-9В
- Напруга живлення силової частини 4.5-36В
- Максимальний струм навантаження крокового двигуна 1.2А
- Розміри 42×58х10 мм
Увага! Шилд сумісний тільки з версією NodeMCU Amica/Doit (v2) і не підійде для NodeMCU LoLin (v3)
Загальна схема плати:
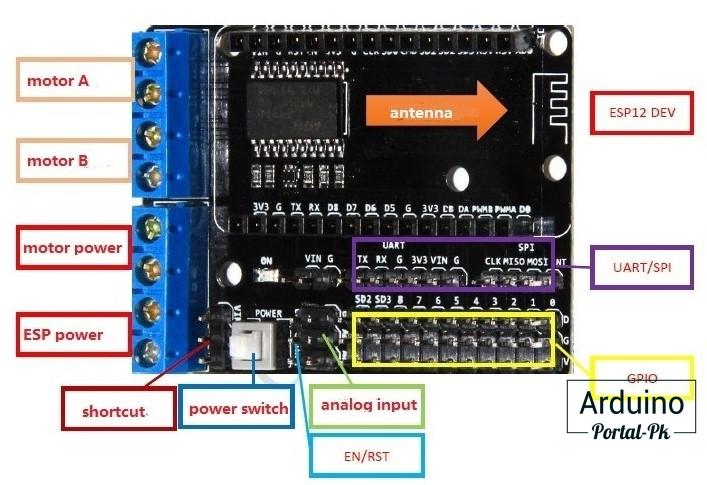
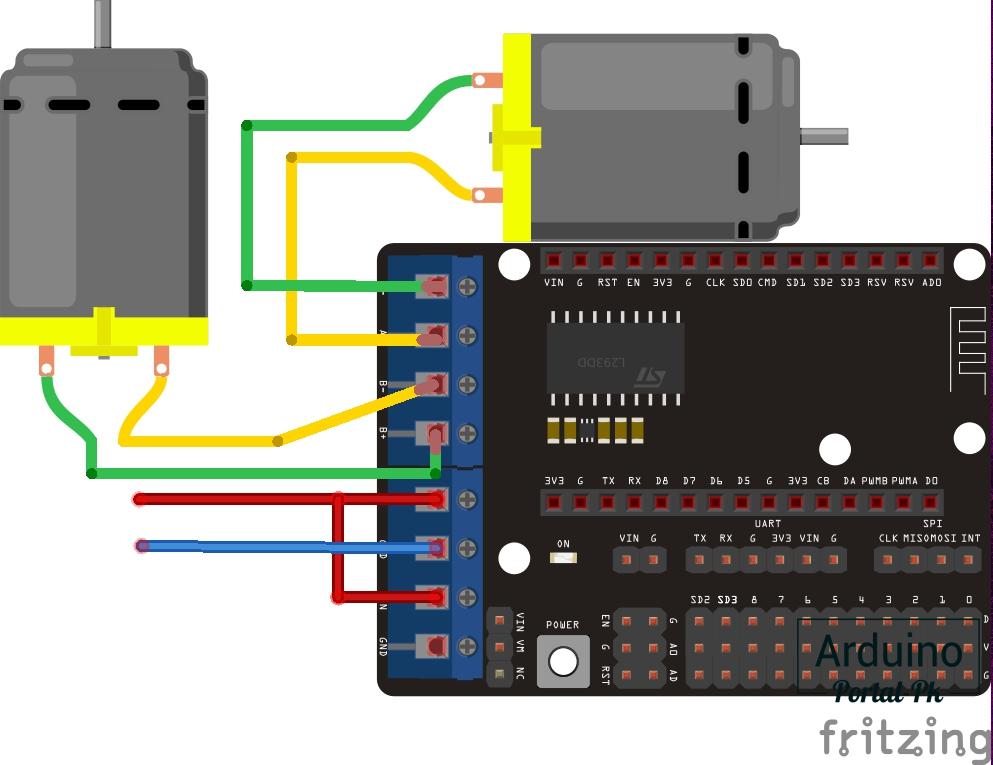
Схема підключення двигунів:
Приклад скетчу для пробного запуску:
#define PIN_D1 5 // gpio5 = D1 PWM_A
#define PIN_D2 4 // gpio4 = D2 PWM_B
#define PIN_D3 0 // gpio0 = D3 DA (A-A+) підключається двигун
#define PIN_D4 2 // gpio2 = D4 DB (B-B+) підключається двигун
void setup()
{
pinMode(PIN_D1, OUTPUT); // ініціалізуємо Pin як вихід
pinMode(PIN_D2, OUTPUT); // ініціалізуємо Pin як вихід
pinMode(PIN_D3, OUTPUT); // ініціалізуємо Pin як вихід
pinMode(PIN_D4, OUTPUT); // ініціалізуємо Pin як вихід
}
void loop()
{
digitalWrite(PIN_D1, HIGH); // PWM_A HIGH
digitalWrite(PIN_D3, HIGH); // DA HIGH
delay (2000); // wait
digitalWrite(PIN_D3, LOW); // DA LOW
delay (2000); // wait
digitalWrite(PIN_D2, HIGH); // PWM_B HIGH, змінюється напрямок обертання двигуна на контактах (B- B+)
digitalWrite(PIN_D4, HIGH); // DB HIGH
delay (2000); // wait
digitalWrite(PIN_D4, LOW); // DB LOW
delay (2000); // wait
digitalWrite(PIN_D2, LOW); // PWM_B LOW
}



Відгуки
Відгуків немає, поки що.