")



Описание
Плата управления двигателями L293D для NodeMCU – это одновременно мотор шилд и плата расширения для WI-Fi модулей NodeMCU V2. В качестве драйвера для двигателей используется микросхема L293D, позволяющая управлять двумя двигателями постоянного тока или же одним шаговым. Максимальный долговременный выходной ток для каждого канала — 0.6А, кратковременный — 1.2 А.
Характеристики:
- Микросхема L293D
- Напряжение питания логической части 4.5-9В
- Напряжение питания силовой части 4.5-36В
- Максимальный ток нагрузки шагового двигателя 1.2А
- Размеры 42×58х10 мм
Внимание! Шилд совместим только с версией NodeMCU Amica/Doit (v2) и не подойдет для NodeMCU LoLin (v3)
Общая схема платы:
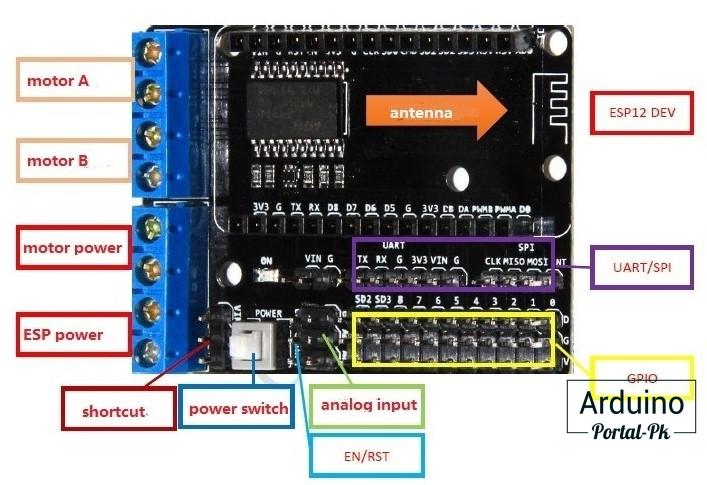
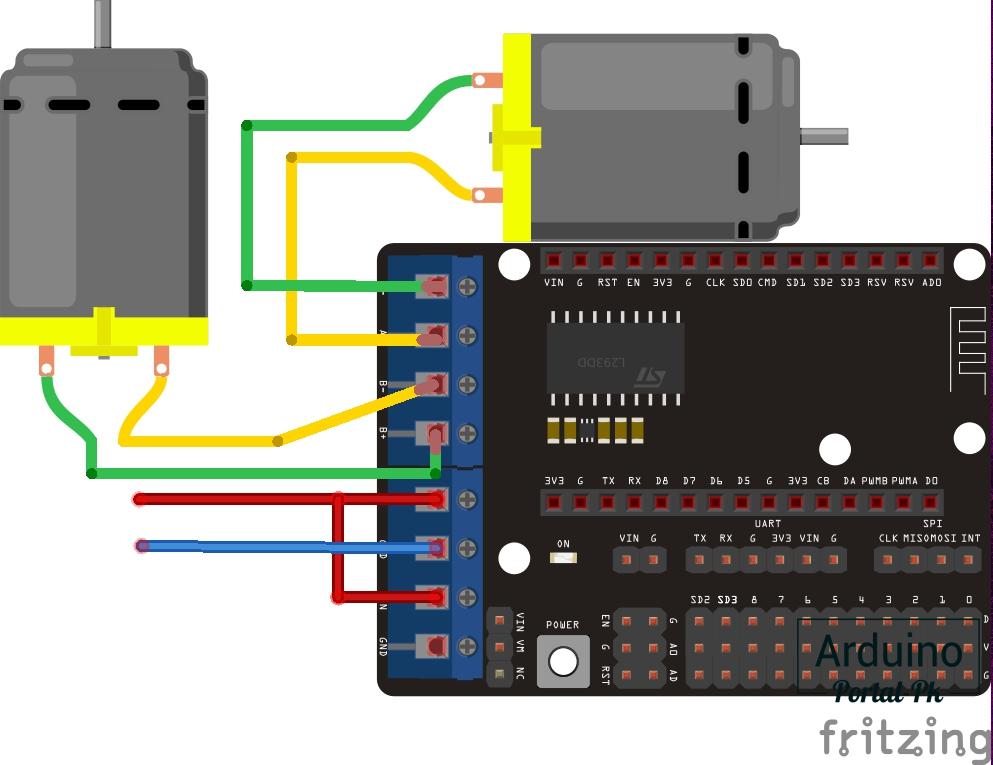
Схема подключения двигателей:
Пример скетча для пробного запуска:
#define PIN_D1 5 // gpio5 = D1 PWM_A
#define PIN_D2 4 // gpio4 = D2 PWM_B
#define PIN_D3 0 // gpio0 = D3 DA (A- A+) подключается двигатель
#define PIN_D4 2 // gpio2 = D4 DB (B- B+) подключается двигатель
void setup()
{
pinMode(PIN_D1, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D2, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D3, OUTPUT); // инициализируем Pin как выход
pinMode(PIN_D4, OUTPUT); // инициализируем Pin как выход
}
void loop()
{
digitalWrite(PIN_D1, HIGH); // PWM_A HIGH
digitalWrite(PIN_D3, HIGH); // DA HIGH
delay(2000); // wait
digitalWrite(PIN_D3, LOW); // DA LOW
delay(2000); // wait
digitalWrite(PIN_D2, HIGH); // PWM_B HIGH, изменяется направление вращения двигателя на контактах (B- B+)
digitalWrite(PIN_D4, HIGH); // DB HIGH
delay(2000); // wait
digitalWrite(PIN_D4, LOW); // DB LOW
delay(2000); // wait
digitalWrite(PIN_D2, LOW); // PWM_B LOW
}


Отзывы
Отзывов пока нет.