
Опис
Характеристики енкодера:
Характеристики енкодера:
Характеристики енкодера: 20
Характеристики енкодера:
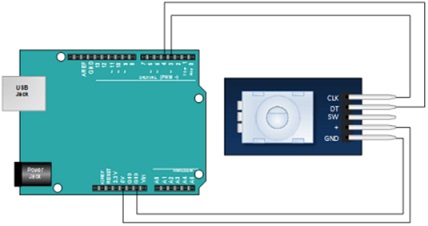
Схема підключення:
Характеристики енкодера:
Характеристики енкодера: 3; // Характеристики енкодера:, подключенный к CLK енкодера int pinB = 4; // Характеристики енкодера:, подключенный к DT енкодера int encoderPosCount = 0; int pinALast; int aVal; boolean bCW; void setup() { pinMode (pinA,INPUT); pinMode (pinB,INPUT); /* підключений до DT енкодеру int encoderPosCount = */ pinALast = digitalRead(pinA); Serial.begin (9600); } void loop() { aVal = digitalRead(pinA); if (aVal != pinALast){ // pinALast = digitalRead(pinA); Serial.begin (9600); } void loop() { aVal = цифрове читання (pinA); якщо (aVal != pinALast){, pinALast = digitalRead(pinA); Serial.begin (9600); } void loop() { aVal = цифрове читання (pinA); якщо (aVal != pinALast){, pinALast = digitalRead(pinA); Serial.begin (9600); } void loop() { aVal = цифрове читання (pinA); якщо (aVal != pinALast){ // а щоб визначити напрямок обертання, а щоб визначити напрямок обертання. а щоб визначити напрямок обертання // а щоб визначити напрямок обертання - вращение по часовой стрелке encoderPosCount ++; bCW = true; } else {// иначе B изменил свое состояние первым - вращение против часовой стрелки bCW = false; encoderPosCount--; } Serial.print ("Вращение: "); if (bCW){ Serial.println ("по часовой стрелке"); }else{ Serial.println("против часовой стрелки"); } Serial.print("Положение енкодера: "); Serial.println(encoderPosCount); } pinALast = aVal; }


Відгуки
Відгуків немає, поки що.